Next: 13.4 Discussion and Exercises Up: 13. Data Structures for Previous: 13.2 : Searching in Contents
The
![]() is a big improvement over the
is a big improvement over the
![]() in terms of
query time--some would even call it an exponential improvement--but
the
in terms of
query time--some would even call it an exponential improvement--but
the
![]() and
and
![]() operations are still not terribly fast.
Furthermore, the space usage,
operations are still not terribly fast.
Furthermore, the space usage,
![]() , is higher than the
other
, is higher than the
other
![]() implementation in this book, which all use
implementation in this book, which all use
![]() space.
These two problems are related; if
space.
These two problems are related; if
![]()
![]() operations build a
structure of size
operations build a
structure of size
![]() then the
then the
![]() operation requires on
the order of
operation requires on
the order of
![]() time (and space) per operation.
time (and space) per operation.
The
![]() data structure simultaneously addresses both the space
and speed issues of
data structure simultaneously addresses both the space
and speed issues of
![]() s. A
s. A
![]() uses an
uses an
![]() ,
,
![]() , but only stores
, but only stores
![]() values in
values in
![]() . In this way,
the total space used by
. In this way,
the total space used by
![]() is only
is only
![]() . Furthermore, only one
out of every
. Furthermore, only one
out of every
![]()
![]() or
or
![]() operations in the
operations in the
![]() results in an
results in an
![]() or
or
![]() operation in
operation in
![]() . By doing this,
the average cost incurred by calls to
. By doing this,
the average cost incurred by calls to
![]() 's
's
![]() and
and
![]() operations is only constant.
operations is only constant.
The obvious question becomes: If
![]() only stores
only stores
![]() /
/
![]() elements,
where do the remaining
elements,
where do the remaining
![]() elements go? These elements go
into secondary structures, in this case an extended version of
treaps (Section 7.2). There are roughly
elements go? These elements go
into secondary structures, in this case an extended version of
treaps (Section 7.2). There are roughly
![]() /
/
![]() of these secondary
structures so, on average, each of them stores
of these secondary
structures so, on average, each of them stores
![]() items. Treaps
support logarithmic time
items. Treaps
support logarithmic time
![]() operations, so the operations on these
treaps will run in
operations, so the operations on these
treaps will run in
![]() time, as required.
time, as required.
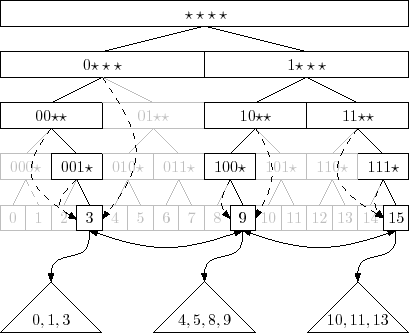
More concretely, a
![]() contains an
contains an
![]() ,
,
![]() ,
that contains a random sample of the data, where each element
appears in the sample independently with probability
,
that contains a random sample of the data, where each element
appears in the sample independently with probability
![]() .
For convenience, the value
.
For convenience, the value
![]() , is always contained in
, is always contained in
![]() .
Let
.
Let
![]() denote the elements stored in
denote the elements stored in
![]() .
Associated with each element,
.
Associated with each element,
![]() , is a treap,
, is a treap,
![]() , that stores
all values in the range
, that stores
all values in the range
![]() . This is illustrated
in Figure 13.7.
. This is illustrated
in Figure 13.7.
The
![]() operation in a
operation in a
![]() is fairly easy. We search
for
is fairly easy. We search
for
![]() in
in
![]() and find some value
and find some value
![]() associated with the
treap
associated with the
treap
![]() . When then use the treap
. When then use the treap
![]() method on
method on
![]() to answer the query. The entire method is a one-liner:
to answer the query. The entire method is a one-liner:
T find(T x) {
return xft.find(YPair<T>(intValue(x))).t->find(x);
}
The first
Adding an element to a
![]() is also fairly simple--most of
the time. The
is also fairly simple--most of
the time. The
![]() method calls
method calls
![]() to locate the treap,
to locate the treap,
![]() , into which
, into which
![]() should be inserted. It then calls
should be inserted. It then calls
![]() to
add
to
add
![]() to
to
![]() . At this point, it tosses a biased coin, that comes
up heads with probability
. At this point, it tosses a biased coin, that comes
up heads with probability
![]() . If this coin comes up heads,
. If this coin comes up heads,
![]() will be added to
will be added to
![]() .
.
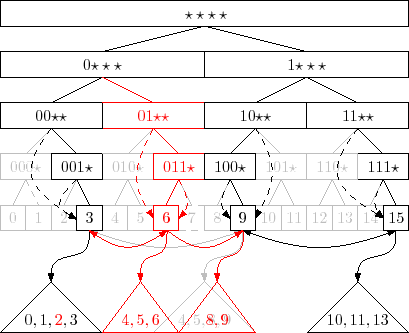
This is where things get a little more complicated. When
![]() is added to
is added to
![]() , the treap
, the treap
![]() needs to be split into two treaps
needs to be split into two treaps
![]() and
and
![]() .
The treap
.
The treap
![]() contains all the values less than or equal to
contains all the values less than or equal to
![]() ;
;
![]() is the original treap,
is the original treap,
![]() , with the elements of
, with the elements of
![]() removed.
Once this is done we add the pair
removed.
Once this is done we add the pair
![]() to
to
![]() . Figure 13.8
shows an example.
. Figure 13.8
shows an example.
bool add(T x) {
unsigned ix = intValue(x);
Treap1<T> *t = xft.find(YPair<T>(ix)).t;
if (t->add(x)) {
n++;
if (rand() % w == 0) {
Treap1<T> *t1 = (Treap1<T>*)t->split(x);
xft.add(YPair<T>(ix, t1));
}
return true;
}
return false;
return true;
}
|
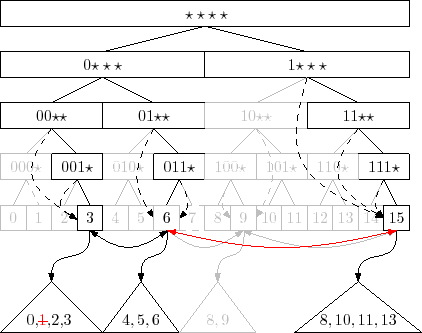
The
![]() method just undoes the work performed by
method just undoes the work performed by
![]() .
We use
.
We use
![]() to find the leaf,
to find the leaf,
![]() , in
, in
![]() that contains the answer
to
that contains the answer
to
![]() . From
. From
![]() , we get the treap,
, we get the treap,
![]() , containing
, containing
![]() and remove
and remove
![]() from
from
![]() . If
. If
![]() was also stored in
was also stored in
![]() (and
(and
![]() is not equal to
is not equal to
![]() ) then we remove
) then we remove
![]() from
from
![]() and add the
elements from
and add the
elements from
![]() 's treap to the treap,
's treap to the treap,
![]() , that is stored by
, that is stored by
![]() 's
successor in the linked list. This is illustrated in
Figure 13.9.
's
successor in the linked list. This is illustrated in
Figure 13.9.
bool remove(T x) {
unsigned ix = intValue(x);
XFastTrieNode1<YPair<T> > *u = xft.findNode(ix);
bool ret = u->x.t->remove(x);
if (ret) n--;
if (u->x.ix == ix && ix != UINT_MAX) {
Treap1<T> *t2 = u->child[1]->x.t;
t2->absorb(*u->x.t);
xft.remove(u->x);
}
return ret;
}
Finding the node
Earlier in the discussion, we put off arguing about the sizes of treaps in this structure until later. Before finishing we prove the result we need.
Similarly, the elements of
![]() smaller than
smaller than
![]() are
are
![]() where all these
where all these ![]() coin tosses come up
tails and the coin toss for
coin tosses come up
tails and the coin toss for
![]() comes up heads. Therefore,
comes up heads. Therefore,
![]() , since this is the same coin tossing experiment considered
previously, but in which the last toss doesn't count. In summary,
, since this is the same coin tossing experiment considered
previously, but in which the last toss doesn't count. In summary,
![]() , so
, so

|
Lemma 13.1 was the last piece in the proof of the
following theorem, which summarizes the performance of the
![]() :
:
The
![]() term in the space requirement comes from the fact that
term in the space requirement comes from the fact that
![]() always
stores the value
always
stores the value
![]() . The implementation could be modified (at the
expense of adding some extra cases to the code) so that it is unnecessary
to store this value. In this case, the space requirement in the theorem
becomes
. The implementation could be modified (at the
expense of adding some extra cases to the code) so that it is unnecessary
to store this value. In this case, the space requirement in the theorem
becomes
![]() .
.